 Preferencias sobre cookies
Preferencias sobre cookies
Filtros activos
ÚLTIMAS NOTICIAS


SECCION PRINCIPAL BUCEO MILITAR





SCOOTER DPV XJ-T

Scooter DPV Suex XJ-T: Scooter subacuático para uso técnico/profesional con cuerpo de aluminio. El scooter submarino XJ-T utiliza una batería Nimh que se recarga en sólo 4,5 horas y ofrece 75 minutos de autonomía a velocidad de crucero y 35 minutos a una velocidad máxima de 85 m/min. El XJ-T puede guardarse en la bodega del avión para facilitar su transporte a cualquier lugar y en cualquier condición.






SCOOTER DPV XJ-S
Scooter DPV Suex XJ-S: Scooter subacuático para uso técnico/profesional con cuerpo de aluminio. El XJ-S ofrece una gran capacidad gracias a su batería de iones de litio, que se monitoriza mediante un indicador especial, la app Calypso y el Eron D-1, por lo que el buceador tiene un control total sobre los 185 minutos de autonomía a velocidad de crucero y 85 minutos a máxima velocidad (85 m/min) para alcanzar una profundidad de 200 metros.




SCOOTER DPV XK
Scooter DPV Suex XK: DPV duradero y de alto rendimiento para los profesionales más exigentes. XK es el DPV para uso técnico/profesional: permite realizar exploraciones de largo alcance y en cuevas gracias a su batería Li-ION que ofrece 330 minutos a velocidad de crucero y 100 minutos a velocidad máxima (100 m/min). Con XK se pueden alcanzar profundidades de hasta 200 metros.
TRANSPONDEDOR ATT-400

El transpondedor ATT-400 puede operar sumergido como un pinger o un transpondedor.

SINAPSI PARA DPV SUEX
Cabeza Sinapsi para Scooters DPV Suex: SINAPSI es un morro especial para la navegación que sustituye al morro estándar. Está equipada con una sofisticada electrónica para recibir y procesar los datos de navegación subacuática adquiridos mediante el DPV Suex. El proyecto SINAPSI ha requerido años de investigación cada vez más sofisticada, incluyendo muchas pruebas y ensayos para optimizar el sistema utilizando las soluciones tecnológicas más interesantes y actualizadas.



ERON D-1 PARA DPV SUEX
Panel de Control Consola Eron D-1 para Scooter DPV Suex: Recepción inalámbrica de datos de DPV. Puede montarse en el soporte de la DPV o llevarse en la muñeca. Activación de la función con un solo toque Autonomía restante en minutos a la velocidad establecida. Estado de carga de la batería del DPV Consumo instantáneo. Velocidad en el agua (disponible con la nariz Sinapsi). Distancia recorrida en el agua (disponible con nariz Sinapsi).


SISTEMA GPS SEIKA PARA DPV SUEX
Suex lleva la señal GPS bajo el agua en modo inalámbrico - SEIKA transmite la posición a todos las consolas ERON D-1 en el agua. SEIKA utiliza un receptor GNSS (Sistema Global de Navegación por Satélite) integrado dentro de una SMB (Boya Marcadora de Superficie) para capturar la posición precisa del buceador y comunicar de forma inalámbrica dicha posición al cuadro de mandos Suex Eron D-1.


SISTEMA RECEPTOR DE PINGER PRS275
Sistema receptor de emisores acústicos combinado de superficie y para buzo.



RECEPTOR ACÚSTICO PARA VEHÍCULOS SUBMARINOS...
VADR-6000M RECEPTOR ACÚSTICO PARA VEHÍCULOS SUBMARINOS




ROTV MINIBAT HAMMERHEAD

Vehículo remolcado autónomo ondulante HAMMERHEAD de la marca OSIL (Ocean Scientific International Limited).






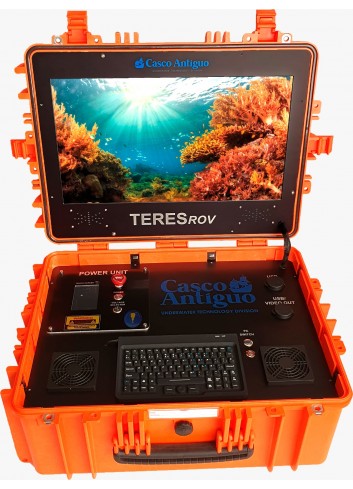
TERESROV

TERESROV, facilita el acceso a la investigación, la exploración y la aventura oceánica. Ofrece las capacidades de un mini-ROV comercial de gama alta al precio de los ROV comerciales más básicos, lo que convierte al TERESROV en un vehículo submarino de inspección e investigación ideal para todos los proyectos. Este ROV suave, estable y altamente maniobrable consta de seis propulsores (u 8 en total como opcional), un chasis robusto y con sistema de alimentación desde superficie con una potencia de 1.100 watios. Las potentes luces regulables proporcionan una excelente iluminación para la transmisión de vídeo HD en directo. Como todos los productos de Casco Antiguo, el TERESROV ha sido desarrollado con piezas de alta calidad, un diseño meticuloso y una fiabilidad robusta con un éxito probado sobre el terreno. Equipado con seis potentes propulsores T200 y ESC básicos, el TERESROV tiene la mejor relación empuje-peso de su clase para realizar tareas exigentes. Es ideal para operaciones en aguas poco profundas a moderadas, con una profundidad estándar de 100 m y longitudes de cable de hasta 300 m. El TERESROV utiliza el software de código abierto ArduSub y el piloto automático Navigator. para ofrecer capacidades autónomas raramente vistas en los mini-ROV y una capacidad de configuración sin parangón.


BLUEBOAT

El BlueBoat es el buque de superficie robótico más asequible del planeta. Con un diseño de casco innovador, infinitas posibilidades de expansión y software BlueOS de código abierto, es la plataforma ideal para levantamientos hidrográficos y desarrollo de sistemas robóticos.